
Dr. Michael M. Porter of Clemson University in South Carolina and team have discovered something very interesting about the mechanics of seahorses – and it may change 3D printed robotics.
The seahorse is a wonderful creature to watch; it’s peculiar shape and familiar horselike head make it unique in the underwater world. A dominant feature is its tail, which, like an elephant’s trunk, is used to grasp nearby objects.
This is a task sought by robotics developers. Thus, the research team investigated the mechanics of seahorse tails and discovered something interesting.
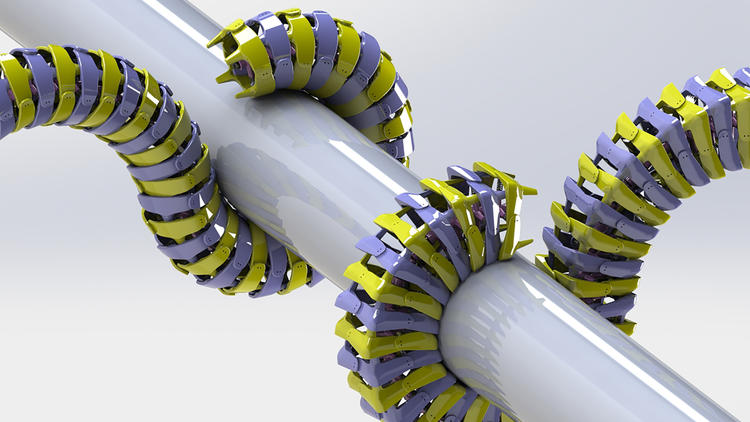
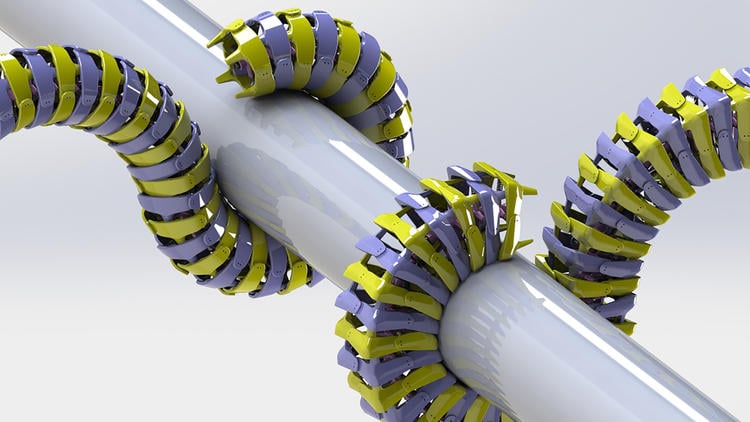
The tail is made up of overlapping L-shaped pieces to form a box-like column. The pieces slide over each other to enable the tail to flex in any direction.
What the researchers found was that this design, as compared to the obvious cylindrical design, permitted much more robust activities. For example, the box column could be squeezed – and the pieces simply close together without losing strength or falling apart. Similarly, the box column could withstand twisting more easily than a cylindrical equivalent.
This strongly suggests that robotic prehensile appendages should take on a similar structure. And here’s where 3D printing comes in: producing L-shaped plates is a very, very easy task. It should now be possible to design standardized plate 3D models to enable anyone to quickly print a functional prehensile robotic arm. Or tail, we suppose.