
Researchers have developed a low-cost, 3D printable humanoid robot design.
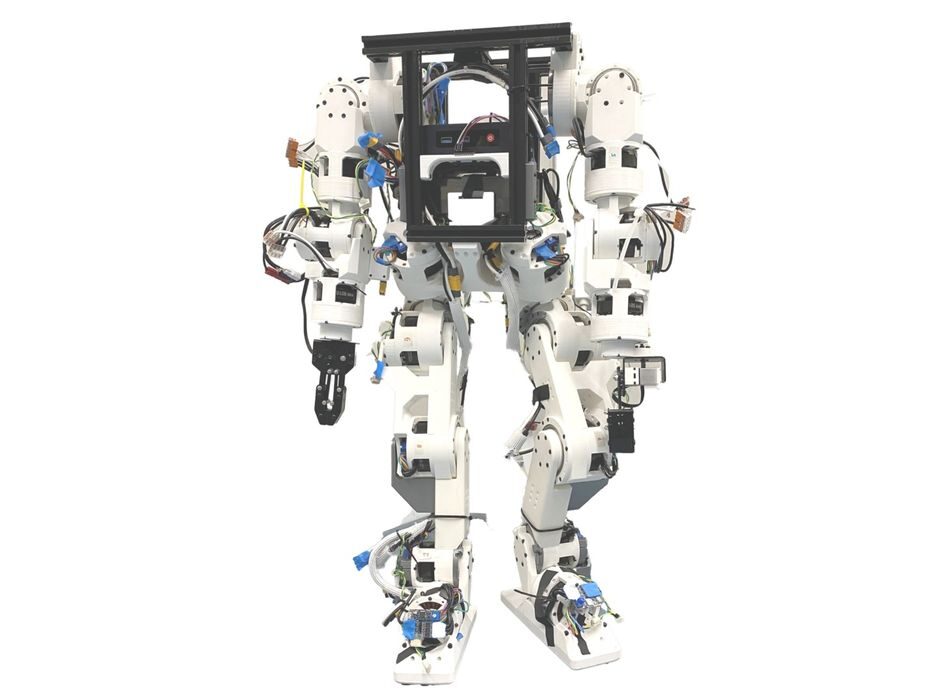
A team at UC Berkeley designed Berkeley Humanoid Lite, a robotic design that takes a human form.
The big change in this design, as there have been plenty of humanoid robot designs made in the past, is that this design increases the proportion of 3D printable parts.
Rather than depending on standard metal CNC’d components or servo-based joints, the researchers were able to develop a new actuator design. This design is based on 3D printed cycloidal gears.
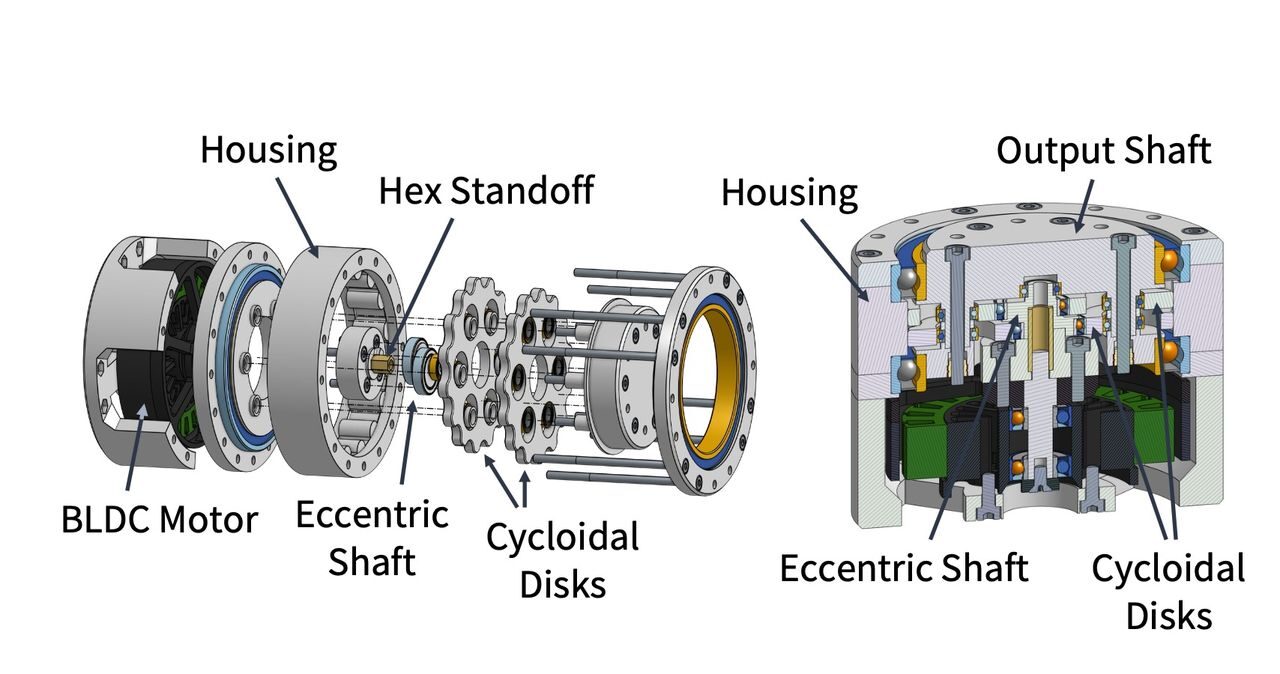
Cycloidal gears have an advantage over standard planetary gears as they spread the load over many contact points at once. This lowers the force on any individual gear tooth, making the system much more durable. They can also be more easily printed since there is less need for small gear teeth that can be challenging to print.
The new actuators were used in the major joints of the robot, the arms and legs. The housing, disks, input, and output shafts are all 3D printed; only reinforcement parts, such as bearings, brass hex inserts, and screws, were off-the-shelf.
Interestingly, they printed the parts in common PLA, which provides a pretty rigid framework for the components. They measured the required engineering parameters and determined that PLA would suffice for this application.
The actuators did work, according to the testing performed in the study, which included a 60-hour endurance test. This means that in the future, 3D printed robots need not rely on very expensive machined parts. That should lower the cost substantially, as these actuators can apparently be printed for as low as US$133 each.
Amazingly, the entire robot can be printed and assembled for less than US$5000, vastly less than most commercial humanoid robot designs on the market. They explain:
“By leveraging 3D printed cycloidal actuators, off-the-shelf components, and a fully open-source hardware and software stack, we demonstrated that effective humanoid systems need not rely on proprietary, high-cost solutions. We evaluated the reliability and versatility of the 3D printed actuators and demonstrated the ability of the robot platform to perform locomotion and teleoperation tasks. By sharing all design files, control algorithms, and manufacturing details, we hope to democratize access to humanoid robot hardware, fostering broader participation in humanoid-robotics research and accelerating innovations in this critical domain.”
The work has been open-sourced, so anyone with the equipment and energy can produce a Berkeley Humanoid Lite of their own with a little investment of time.
Via ArXiv and UC Berkeley