
Researchers developed 3D printed, muscle-inspired magnetic actuators that push, pull, crawl, and grasp.
The research paper describes a family of soft actuators that convert applied magnetic fields into useful work across several modes. These elastomeric devices could be produced with digital fabrication methods, including 3D printing, then magnetized to create programmed motion without pumps or wiring. For automation, wearables, or medical tools where wiring and plumbing don’t work, the potential is obvious.
Soft robotic actuators today are usually pneumatically powered or fiber reinforced elastomers that inflate, plus thermal or electric options like shape memory alloys. Those systems work, but they require tubing, compressors, heat, or high voltages. Magnetic actuation delivers forces wirelessly through the body of the part, enabling sealed mechanisms and lightweight assemblies. The catch is that you need materials loaded with magnetic particles and a controlled magnetic field source.
From Geometry To Magnetization Patterns
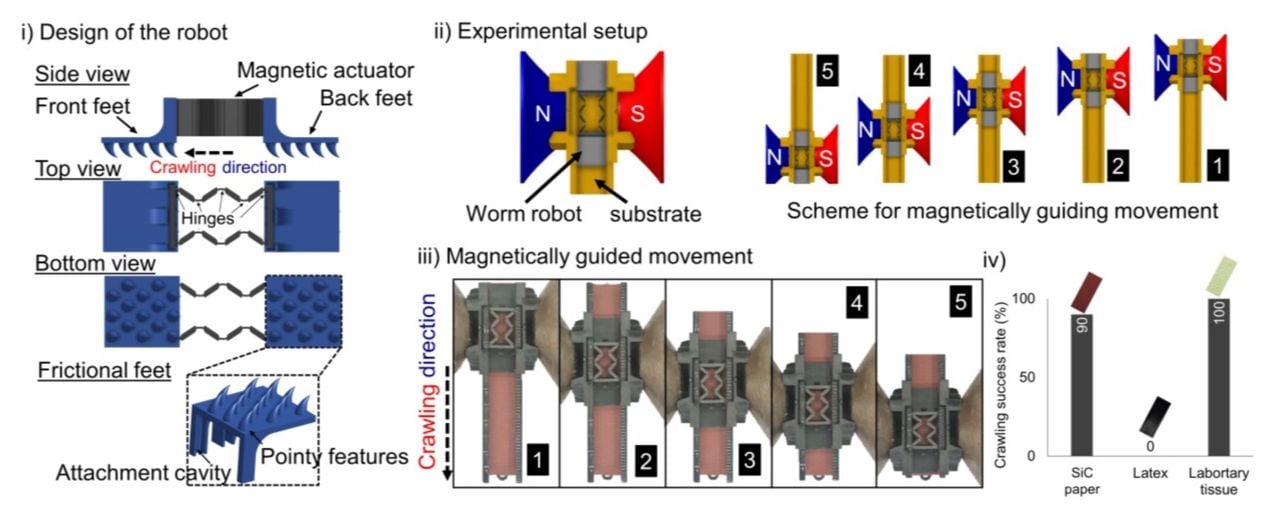
The actuators appear to combine compliant geometries with embedded magnetization profiles so that a uniform or gradient magnetic field produces torques and linear forces in specific directions. That is how one device can both push and pull, while others crawl using friction anisotropy or grasp using coupled segments. The researchers are treating magnetization like an internal muscle pattern and geometry like the skeleton!
This design language should carry forward into processes that already handle elastomers and composites. Direct ink writing (DIW) of magnetoactive elastomer inks is well known, and stereolithography or digital light processing (SLA/DLP) can print rubbery photopolymers that are later infused or combined with particles. Even flexible FFF filaments can accept modest particle loadings. After printing, a magnetization step aligns domains to the desired pattern, typically using strong fields or jigs — a workflow that could be implemented in a additive process.
The paper’s range of capabilities — push, pull, crawl, grasp — suggests that this is really a modular toolkit rather than a single demonstration. This means a library of printable unit cells designs and magnetic field programs can be reused across parts, speeding up design iteration with far less fuss than when using previous approaches.
Practical Constraints
There are, however, some constraints. The magnetic field hardware is not simple and require bulky magnets or energized coils, which could limit system portability. Field strength falls off quickly with distance, so larger devices see less force density than micro scale ones. Particle loading that is high enough for good actuation can make inks viscous, reduce elongation at break, and complicate curing. DIW throughput is modest, and elastomer support strategies in SLA/DLP remains troublesome, as all 3D printer operators will know. None of these is a showstopper, but it could slow down adoption.
On the plus side, removing hoses and wiring lowers assembly work and human labor. A single printed part that clamps or crawls under a bench top magnet can replace multiple molded components and fittings. That sounds pretty compelling for those experimenting with soft mechanisms, research labs building one-offs, and medical device groups that need sealed, sterilizable parts. The software side also has some potential: magnetization vectors could be encoded per voxel or per feature, something that CAD systems could include.
This is quite an interesting capability that could make 3D printed production of robots easier.
Via arXiv