


A research team from UCLA has been able to 3D print a small robot in (almost) a single print job.
In a new paper published in Science, the researchers were able to combine 3D printing, 4D design and embedded electronics to produce small, functional robots that actually moved around on their own.
The robots were 3D printed in a single job using a novel multi-material device, and required nothing to be added aside from a battery.
4D design is the science of creating materials that can alter their shape after production. It was extensively used in this project to form the motion system on the robots, and leveraged piezoelectric effects. They explain the concept:
“The authors were able to engineer these three-dimensional materials to be capable of a variety of motions and transducer functions by using additive manufacturing to build the complex shapes. They demonstrate their functionality for actuation and sensing in a unified miniaturized mobile robot that can move, sense, and perform feedback control.”
And:
“We report a design and manufacturing route to create a class of robotic metamaterials capable of motion with multiple degrees of freedom, amplification of strain in a prescribed direction in response to an electric field (and vice versa), and thus, programmed motions with self-sensing and feedback control. These robotic metamaterials consist of networks of piezoelectric, conductive, and structural elements interwoven into a designed 3D lattice. The resulting architected materials function as proprioceptive microrobots that actively sense and move.”
Their work was incredibly complex, as they had to design a cascading series of varying piezoelectric zones that, added together, created the ability to move. Here’s a tiny peek at some of their work, so you can get an idea of what they’re up to:
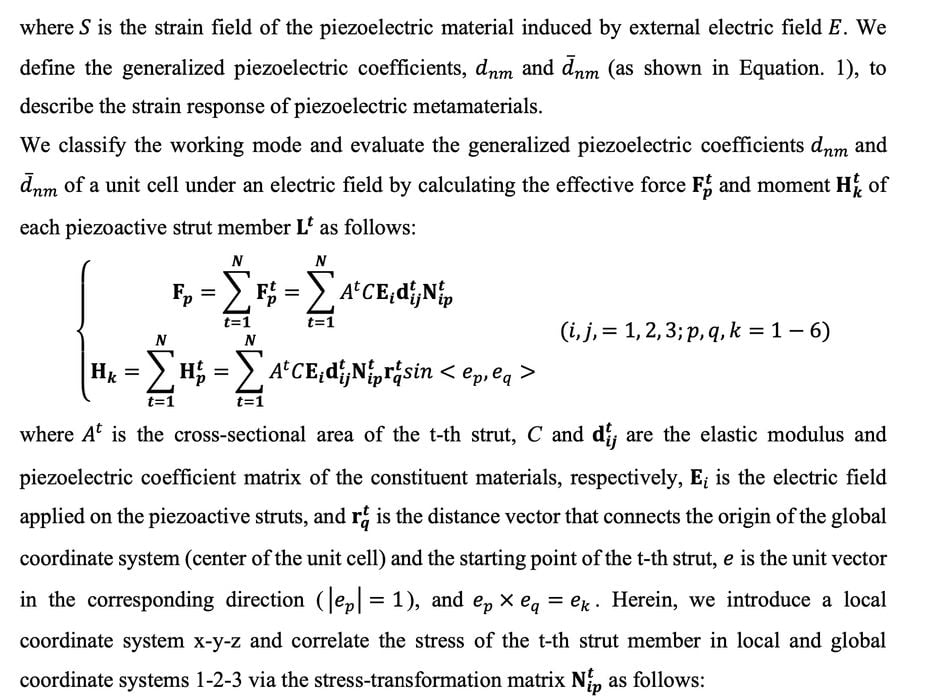
Yep, complicated. And that’s just a couple of paragraphs; there is much, much more to this.
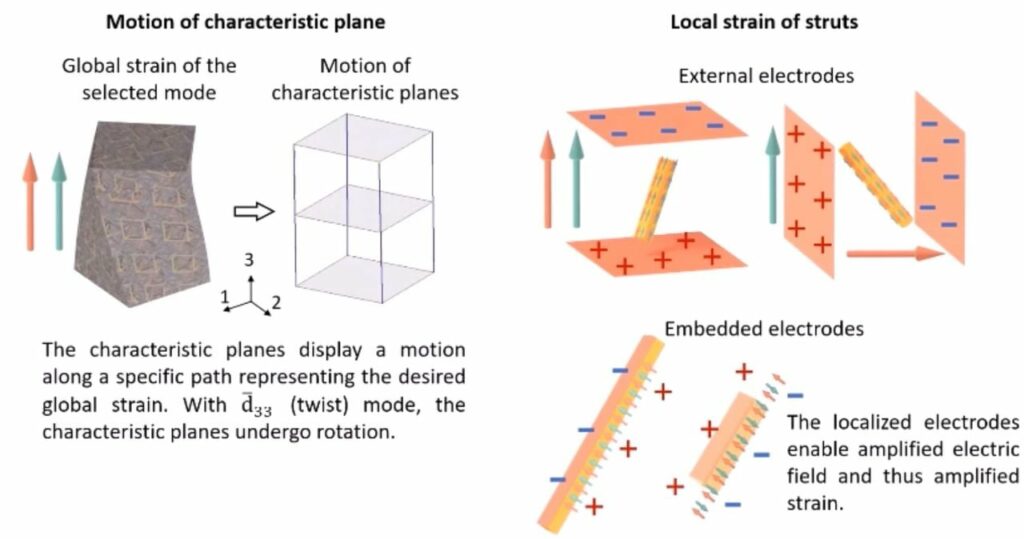
The idea is to develop cells that exhibit a predictable motion upon the application of energy. The cells were composed of a series of “struts” that each have basic piezoelectric characteristics. By building up a series of cells you can create complex motion systems.
For the 3D printing system, they apparently used a charged resin system mixed with piezoelectric nanoparticle colloids and SiOC preceramic monomers, along with standard photoinitiators.
They did not use a standard 3D printer, but instead chose to build a custom designed device to print the lattice structures. Evidently they were able to achieve multi-material printing using an unusual approach:
“The projection system of the printer consists of a UV light engine (Wintech PRO4500 with 405nm wavelength UV), a light collimation lens and a focusing lens. Multiple printing bath filled with different materials are placed on a substrate and there are ethanol spraying chambers between each printing bath. The substrate is fixed on a linear stage while the printing stage is fixed on another linear stage that is perpendicular to the one with substrate.”
Apparently the approach was to print a layer, then wash away resin with Ethanol. This left space for a second resin to be applied and cured in voids left by the first curing.
I’d like to learn more about this 3D printer’s design, as it could have significant commercial value on its own. However, as it is cleaning out resin on each layer, it could be very time consuming to print and also quite expensive due to the amount of resin that’s washed away on each layer.
There was a post processing step to electroplate metals to form electrodes, so it may not be quite true that the objects were 3D printed in a single job operation.
The researchers were also able to create simple sensors, and by combining it all together they built a small robotic system that could successfully navigate obstacles, pick up and drop off objects and other basic tasks.
This is incredibly impressive and is a demonstration of what may be to come: small machines generatively designed to complete tasks.
For many years 3D print technology has been challenged by severe constraints on material choice. It is still inconceivable to contemplate 3D printing even a simple electronic device, as there are too many different materials and parts required.
However, the UCLA team seems to have found a way around material limitations by in effect substituting their own materials using the 4D technique. They don’t need to 3D print electric motors out of metal and magnets because they can make fully functional motors out of their piezoelectric material.
If one were to develop software that used standard building blocks of this type, it would be possible to design all kinds of fascinating devices with this type of 3D printer. Such a system would be incredibly valuable.
Via Science and EurekaAlert