
Researchers demonstrated autonomous miniature robots that use piezoelectric-actuated 3D printed resonators to move and steer, offering a new approach for microrobotics that AM practitioners can fabricate in the lab.
The paper describes a motion platform where a compact piezoelectric element excites lightweight resonator structures that were designed and produced with additive manufacturing. Rather than rely on bulky geartrains or tethered vibration motors, the robot uses structural resonance to convert high frequency, low stroke motion into forward travel and turning.
This approach lands in the current wave of small-scale mobility research, where teams mix compliant mechanisms, resonant flexures and low-cost electronics to achieve controllable motion.
Prior work often used laser-cut laminates, MEMS fabrication, or soft elastomer actuators. Here, the resonators are 3D printed — likely with resin processes such as SLA or DLP — allowing geometry to be tuned quickly for target frequencies and directional bias without tooling.
The key element is that the resonator is the mechanism. Instead of printing a housing around off-the-shelf motion parts, the printed geometry is the motion amplifier, and small piezoelectric patches serve as the energy source. That blends structural design, materials and dynamics in a way designers can iterate rapidly across a build plate.
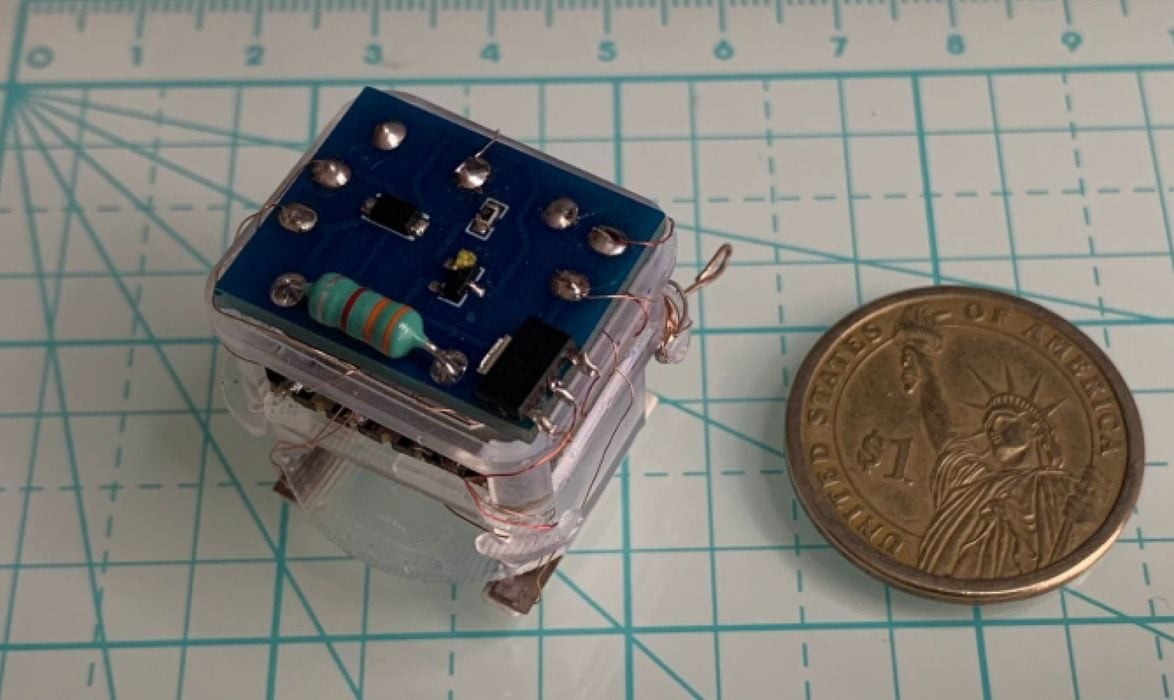
Printed Resonators As Locomotion Engines
The robot’s 3D printed features behave like a tiny tuning fork. When driven at the right frequency, standing waves form in the structure and the contact points with the ground trace microscale ellipses. Asymmetric friction at those feet generates net thrust. Steering is created by shifting drive frequency, amplitude or phase between multiple resonators, enabling trajectory control without adding steering actuators.
The novelty here is not vibration-driven motion, but the integration of resonant mechanics, on-board power and control into a compact, battery-supported platform. The researchers focus on autonomy and embedded trajectory control, implying a microcontroller closes the loop to follow prescribed paths. Throughput details, top speed, battery life and maximum payload are not stated in the abstracted sources, so we cannot benchmark against other microrobots yet.
AM is key to the concept because resonator performance is geometry critical. With resin printing, designers can iterate fillets, beam thickness, and foot textures quickly, pack dozens of variants into one job, and empirically converge on a resonant mode that yields reliable traction. That is a stark contrast to machined spring-steel flexures or MEMS processes, where iteration costs time and external vendors.
Constraints, Reliability And Use Cases
There are caveats. Photopolymer resins can be brittle and may fatigue under high-cycle excitation, so long-term durability needs data. Print orientation, layer lines and post cure can shift stiffness and, therefore, resonance. The assembly step — bonding piezo patches to printed parts — adds variance, and adhesive consistency affects damping. None of these are showstoppers, but they will define yield and repeatability for labs or startups trying to scale builds.
Even with those constraints, the economics could be attractive. The bill of materials is light, print times at this scale are modest, and the architecture is scalable for parallel builds. Likely beneficiaries include research labs, education programs, and inspection or swarm robotics projects that need many units with customizable gaits. For industry, these mechanisms could enable low-cost crawlers for confined spaces.
Compared to other small-robot approaches — such as shape-memory alloy wires, dielectric elastomer actuators or micro geartrains — the resonance route favors simplicity and low touch labor. It sidesteps precision assembly at microscopic tolerances, trading it for smart geometry and frequency control. Whether that translates to field reliability depends on fatigue and controllability on rough, dusty or oily surfaces.
What To Watch Next
The next milestones are straightforward: publish speed, efficiency and fatigue-life data; share print settings and material choices; and demonstrate control repeatability across multiple prints and surfaces. A compelling follow-up would compare identical designs produced on different resin printers to quantify process sensitivity. It is also possible we will see multi-material experiments — for example, printing soft feet onto a stiff resonator — to expand traction envelopes.
If the resonators can survive millions of cycles and maintain calibration, 3D printed geometry might become the new firmware for gait design, where altering a spline in CAD is equivalent to reprogramming how a robot walks.
Via Actuators (MDPI)