
A collection of nine new Bambu Lab patents provides a detailed picture of several future 3D printer concepts.
motion
Voron Trident R2 Updates Motion And Assembly
Voron has released Trident R2, a design refresh that focuses on belts, idlers, and motion alignment.

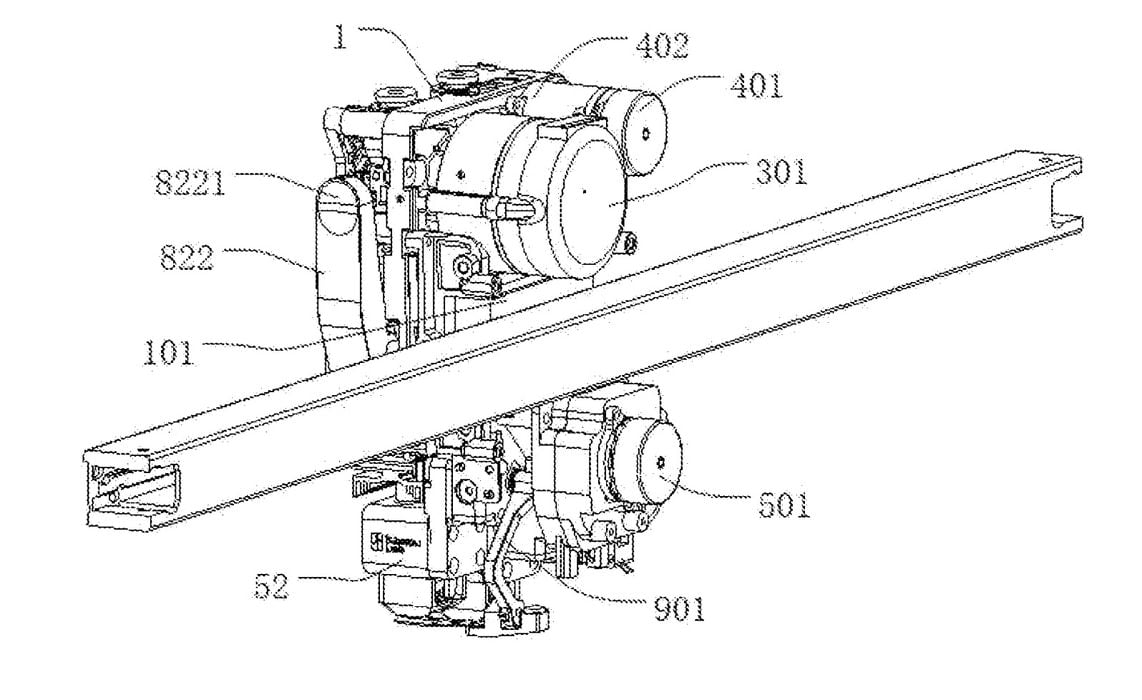
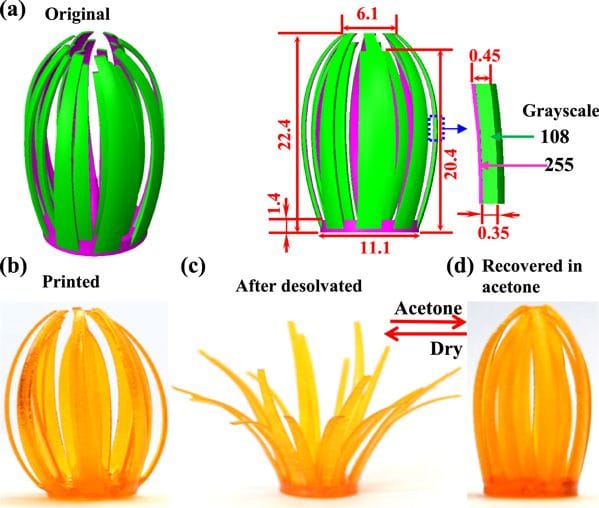
Rotational MultiMaterial 3D Printing of Pneumatically Programmable Soft Robots
Anthony Palumbo and Charles Goulding examine how rotational multi-material 3D printing embeds programmable pneumatic channels in elastomer filaments to create soft robots that bend, twist, and grasp on command, while highlighting key durability and scaling limits. Introduction Soft robots can bend, twist, and conform around delicate objects, enabling safer interaction than many rigid mechanisms. However,… Continue reading Rotational MultiMaterial 3D Printing of Pneumatically Programmable Soft Robots
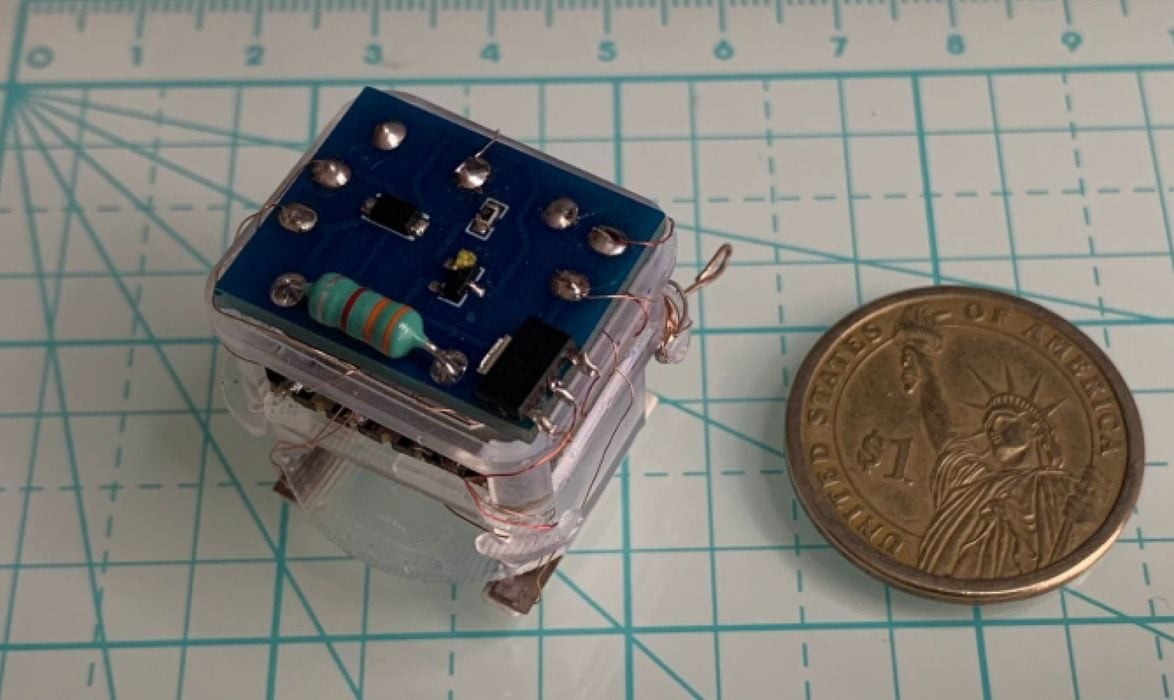
Piezoelectric 3D Printed Resonators Enable Tiny Robots
Researchers demonstrated autonomous miniature robots that use piezoelectric-actuated 3D printed resonators to move and steer.
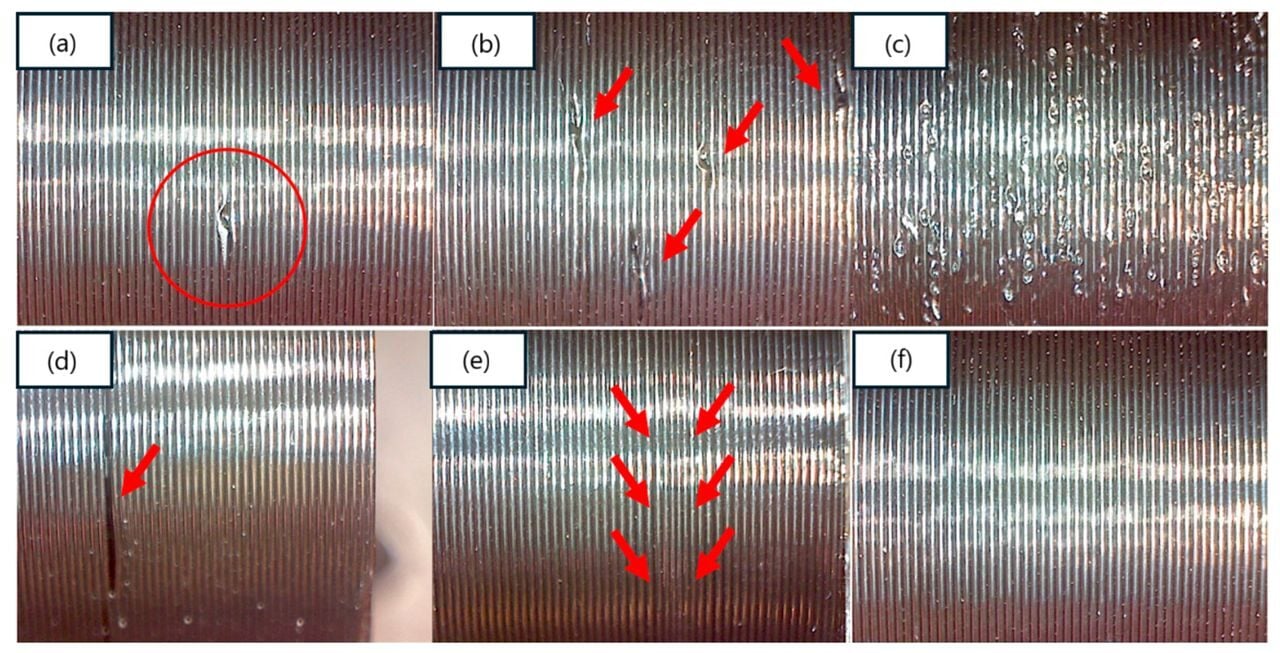
Active Vibration Control Sharpens FFF Surface Quality
Researchers report that real-time vibration monitoring with active control meaningfully improves the primary profile surface finish on Fused Filament Fabrication (FFF) prints.
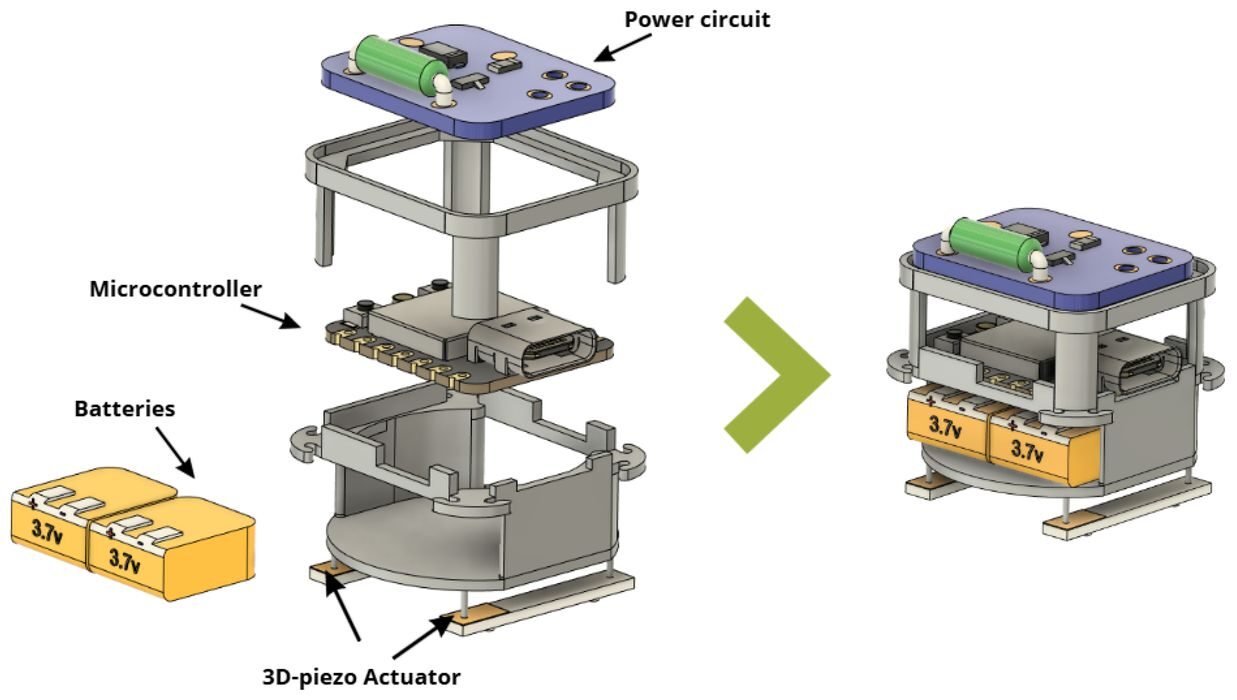
3D Printed Resonators Drive Tiny Robots With Built-In Control
A new preprint outlines miniature robots propelled by piezoelectric-actuated, 3D printed resonators that promise autonomous locomotion with trajectory control embedded in the structure itself.

MoBluRF Enables High-Quality Dynamic 3D Capture Using Ordinary Smartphones and Cameras
Researchers have developed a new approach for capturing 3D models using neural radiance fields.

BCN3D Unveils the Omega I60: A High Speed IDEX 3D Printer
BCN3D announced new and rather interesting production FFF 3D printer, the Omega I60.
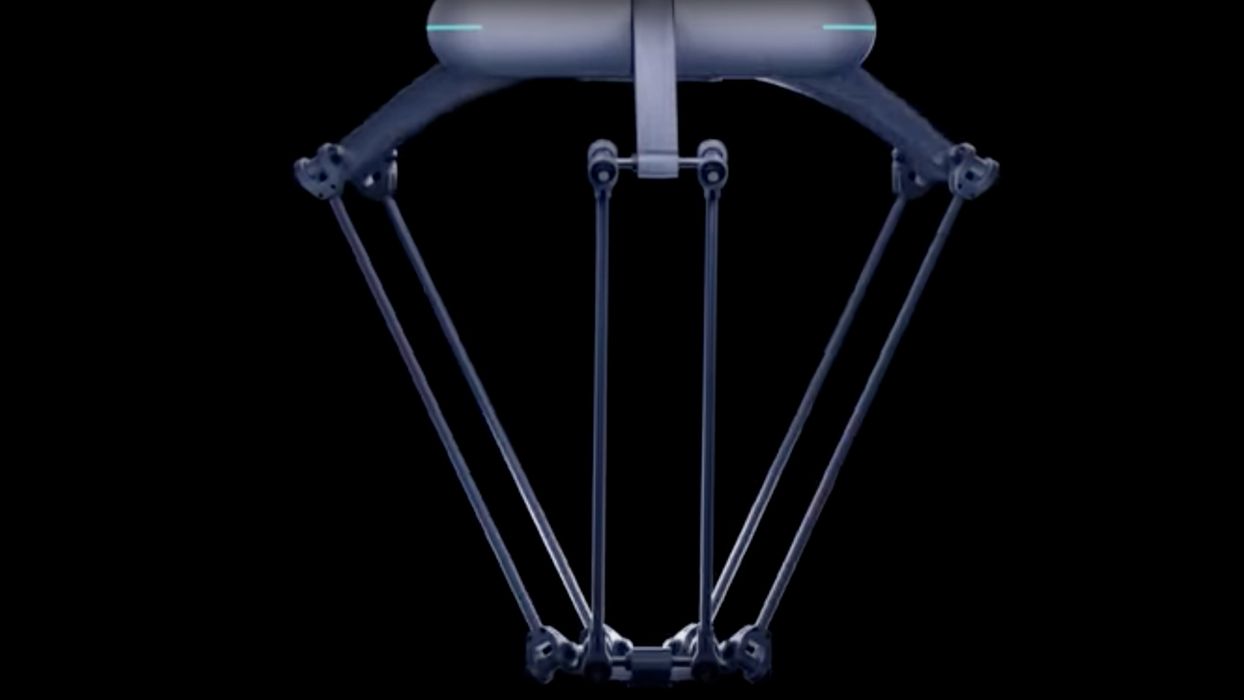
What Could the ‘Moonlight’ Robot Mean for 3D Printing?
A fascinating new motion system has been developed that just might have an application or two in the 3D print world.

The Plybot 3D Printer’s Most Unusual Motion System
A new Kickstarter project features a 3D printer with the most unusual motion system.
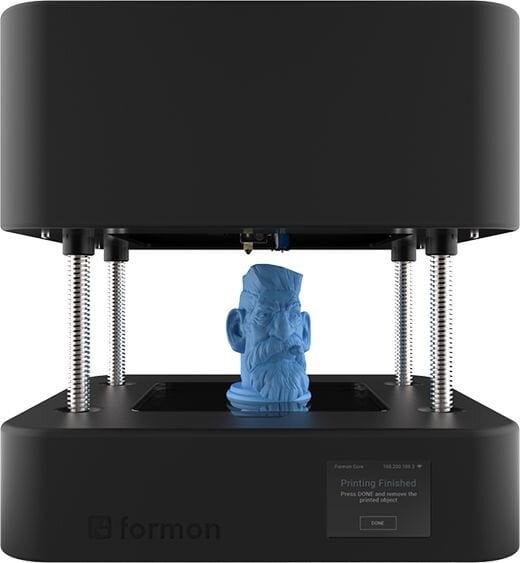
An Unusual 3D Printer Design From Formon
The Formon Core desktop 3D printer includes one of the most unusual motion systems I’ve yet seen.
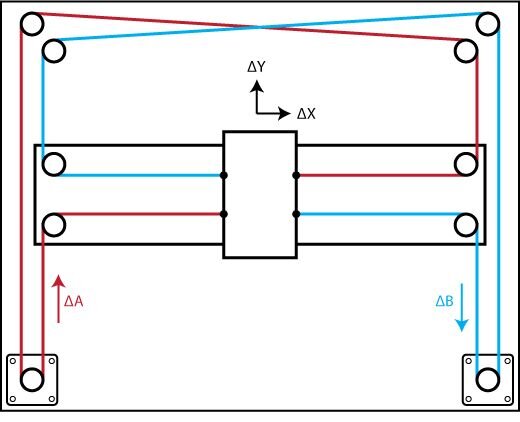
Are CoreXY 3D Printers Taking Over?
CoreXY is becoming a very popular approach for 3D printer motion systems, but is it the ultimate answer? We list the advantages and disadvantages.

Filament Innovations’ Ball Screw 3D Printing Experiments
What can be used instead of belts in a 3D printer motion system? Filament Innovations is experimenting with a ball screw to enable high-speed and high-temp use.

Folding Paper with 3D Printing
New research shows an interesting approach for producing mechanical paper devices with 3D printing.
Making 4D Prints Using 3D Tech
Researchers have developed a very interesting method of actuating 3D prints.

The Unusual Science of 3D Printed Motion
Researchers at MIT have come up with an ingenious new approach for motion studies using 3D printing.

A Linear Induction Motion System for 3D Printers?
There could be more mysteries to the already mysterious Essentium HSE 3D printer.
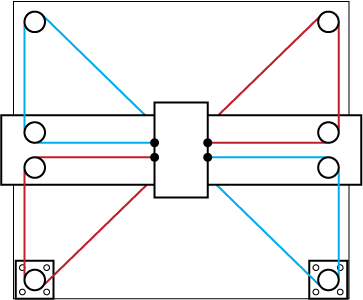
What Does “CoreXY” Mean?
When reviewing the specs for 3D printers, you might encounter the term “CoreXY”. What is a “CoreXY” system?