
Researchers report fully 3D printed magnetoelectronics that let printed parts sense their own motion and state, enabling interactive appliances and self aware 4D mechatronics.
What is being printed here? Not just the housing. The team describes additively manufactured structures that include both magnetic features and conductive elements so a part can detect rotation, proximity, closure, or deformation without bolted on sensors.
This approach combines multi material extrusion and soft robotics. We have seen printed strain gauges, flexible conductive paths, and embedded magnets before. The novelty is the codesign of the magnetic field source and the printed readout, packaged entirely inside the printed geometry. In other words, the part becomes the transducer.
This approach has fewer components, less assembly, and a much cleaner industrial design. If the hinge, knob, or latch can report its own state, you remove wiring runs, connectors, and mechanical alignment steps that require human labor and also introduce possible points of failure.
Why Print The Sensor Into The Part?
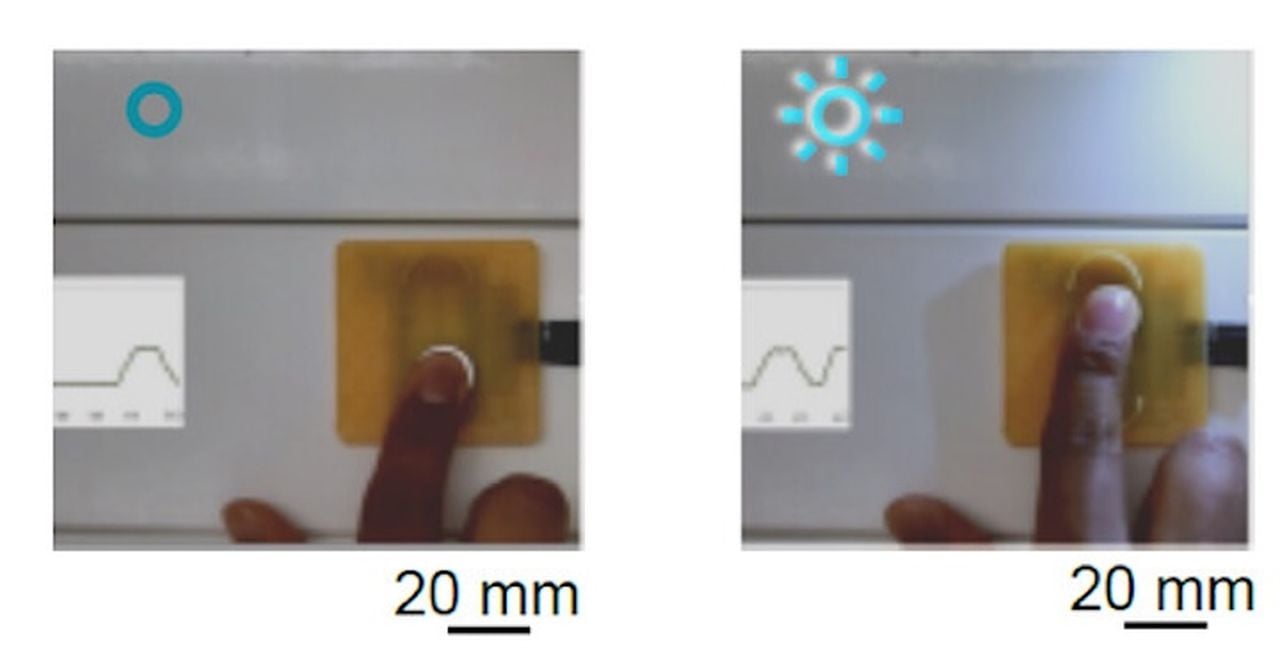
Magnetic sensing is contactless and tolerant of dirt, moisture, and mechanical wear. A sealed polymer hinge with an internal magnet and printed magnetosensitive element can register angle without a fragile flex cable or wiper. That is attractive for consumer appliances, fixtures, and educational mechatronics where reliability must coexist with cost pressure.
The paper’s positioning of “self aware 4D printed mechatronics” hints at shape changing structures that also know how they are changing. If a compliant mechanism bends when heated or actuated, embedded magnetoelectronics can provide feedback to close the loop. That is a missing link for many 4D printing demos that look great on video but lack control.
How The Approach Likely Works
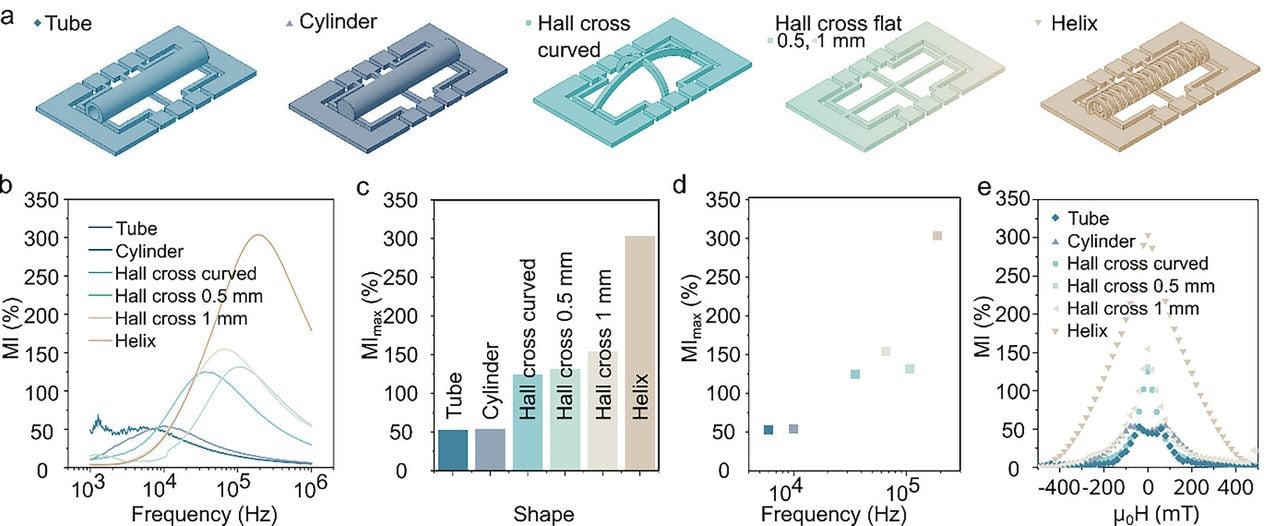
While the researchers’ exact stack is described in the paper, the general approach is pretty clear. Multi material 3D printing deposits a conductive polymer composite for traces and sensing elements, and a magnetic particle loaded composite for field sources. After printing, selected regions are magnetized to program field direction. As the part moves, the field at the printed sensor changes, producing a readable signal. A small off the shelf microcontroller would interpret those changes.
Process used is likely filament extrusion or resin printing of polymer composites with ferrite or rare earth particles. That keeps costs down and enables desktop prototype iteration, but it also sets limits on resolution, conductivity, and field strength. Expect modest bandwidth and sensitivity compared to silicon Hall sensors, and plan on requiring amplification and calibration in firmware.
The big win here is integration. Interactive appliance prototypes like knobs that know their angle, lids that confirm closure, and sliders that report position could be printed in a single job and assembled with almost no wiring.
Practical Limits And Who Could Benefit
There are some catches with this approach. Abrasive magnetic and conductive fillers easily chew through brass nozzles, so hardened steel hardware are required when printing. Thermal drift, hysteresis, and demagnetization above certain temperatures will likely require re-calibration periodicallly. Electromagnetic noise and nearby steel can mess up electromagnetic readings.
Even so, education, HCI labs, appliance OEM concept teams, and soft robot researchers now have an intriguing new tool. Instead of routing fragile PCBs through joints, they can print the joint and the sense path as one unit, then iterate geometry and firmware together, at least for some applications.
The potential industry impact is about costs. If basic mechatronic sensing can be accomplished by printing the mechanical part, the economics of low volume smart mechanisms change. You are getting time back from assembly, fixtures, and procurement.
There would be a requirement for new design tools, however. We will need slicer support, magnetization fixtures, and a library of field geometries with known transfer functions. Without that, this is a proof of concept. With it, it could become a truly practical method for many types of interactive parts.
Via Advanced Science