
A new paper outlines a unified, simulation-first pipeline that validates a lightweight, 3D printed 14 DOF humanoid before any plastic touches a heated bed.
Humanoid platforms are expensive to prototype, which is why low-cost additive builds keep drawing labs and student teams. The catch is that thermoplastics like PLA trade machining cost for stiffness, creep resistance, and fastener strength, especially under dynamic gait loads. The authors of this study try to fill that gap with a single workflow: extract geometry and inertial properties from a full CAD assembly, run finite element analysis (FEA) for worst-case loading, derive torques with Euler–Lagrange dynamics, generate smooth joint trajectories, and validate motion with MATLAB and CoppeliaSim before committing to hardware design.
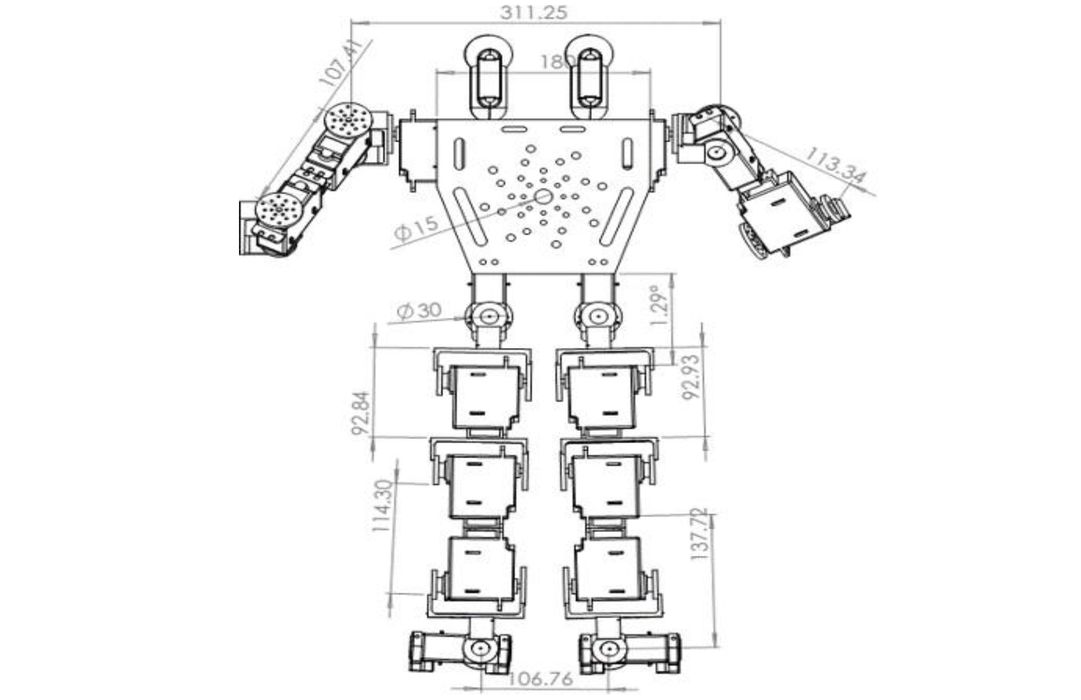
The approach targets the FFF process using PLA for a compact torso, pelvis, and 3 DOF per leg in the sagittal plane, plus 3 DOF per arm for expressive motion. The design bakes in AM-conscious features — controlled wall thickness, internal ribs, and reinforced joint housings — to counter PLA’s low yield strength relative to metals and engineered polymers.
PLA, FEA And A Conservative Load Case
The paper is pretty clear about material assumptions: PLA at E = 1.65 GPa, Poisson’s ratio 0.34, and yield strength 31.9 MPa (ASTM D638). The researchers applied a highly conservative static load of 1 kN to the lower limb with the foot fixed, then sweep mesh density until stress stabilizes within three percent.
That 1 kN figure is far above the expected weight of a compact PLA humanoid, but the oversizing exposes weak features early. As important, the deformation stays small relative to link length, so forward kinematics are not derailed by flex. TLDR: printed ribs and housings are doing real work here.
From CAD To ZMP: What’s New
Where this work goes beyond a typical student bot is the closed loop between geometry, dynamics, and control profiles. Link masses and centers of gravity are computed directly in CAD, then used without translation in the Denavit–Hartenberg model and the Euler–Lagrange torque calculation. The team drives each joint with cubic polynomials to ensure zero start and end velocities, helping keep inertial spikes out of hobby servos.
There are concerns, as is usual with a freshly designed concept. The paper does not disclose printer model, nozzle, layer height, infill, contour count, print orientation, or annealing. PLA’s anisotropy, creep under sustained load, and softening near 60C could alter the real safety factor, especially at rib junctions and insert bosses. Servo heat soak into PLA housings is not discussed. Fastener strategies, threaded inserts, and adhesive bonding are mentioned functionally but not quantified for pull-out or torque retention.
However, by linking CAD mass properties to dynamics and stability checks, the researchers minimize rework, reduce human touch time, and make it clearer which features must be beefed up before the first print.
For adoption, the obvious next step is hardware: a full print with documented slice parameters, orientation, and post-processing, plus instrumented walking trials and fatigue data. A creep and cycle-life study across a few thermoplastics — PLA, PETG, ABS and perhaps a nylon / carbon fiber blend — would map the cost–stiffness–durability envelope for this architecture. It would also be useful to see tolerance stack-up on joint alignment after print, support removal, drilling, and fastener installation.
If those results still work, the path ahead could include topology optimization to shed mass where the FEA shows margin, metal inserts in hot zones, and incremental automation in assembly to standardize actuator alignment. An open library of STLs and parameter files would accelerate replication for labs that need a capable testbed more than they need bespoke metalwork.
If you can make a pair of printed legs that survive a kilonewton on paper, the next trick is proving they can do it on the lab floor, day after day.
Via IJFMR