
Researchers unveiled SOLen, a 3D printed soft optical sensor that guides light with an internal lens for mechanosensing.
The work is one of many that attempt to embed sensing directly into structures instead of attaching them later. Soft robotics has used resistive and capacitive sensors printed in elastomers, but those approaches often suffer from drift, hysteresis, and electrical noise. Optical approaches avoid many of those problems. By routing light through soft, transparent bodies and reading intensity changes, designers can measure pressure, touch, and stretch without metal traces or fragile wires.
3D printing is a natural fit for this class of device. Monolithic builds can place waveguides, cavities, and mechanical features in one print, trimming assembly time and improving repeatability. Several printer classes can produce transparent or translucent elastomer geometries, including Digital Light Processing (DLP) and Stereolithography (SLA) with flexible photopolymers, multimaterial inkjet systems that print elastomers and lenses together, and direct ink writing of silicones when optical clarity allows. SOLen’s emphasis on a printed lens suggests the team focused on optical coupling inside the part rather than relying on external optics and painstaking alignment.
How Lens-Guided Soft Sensing Works
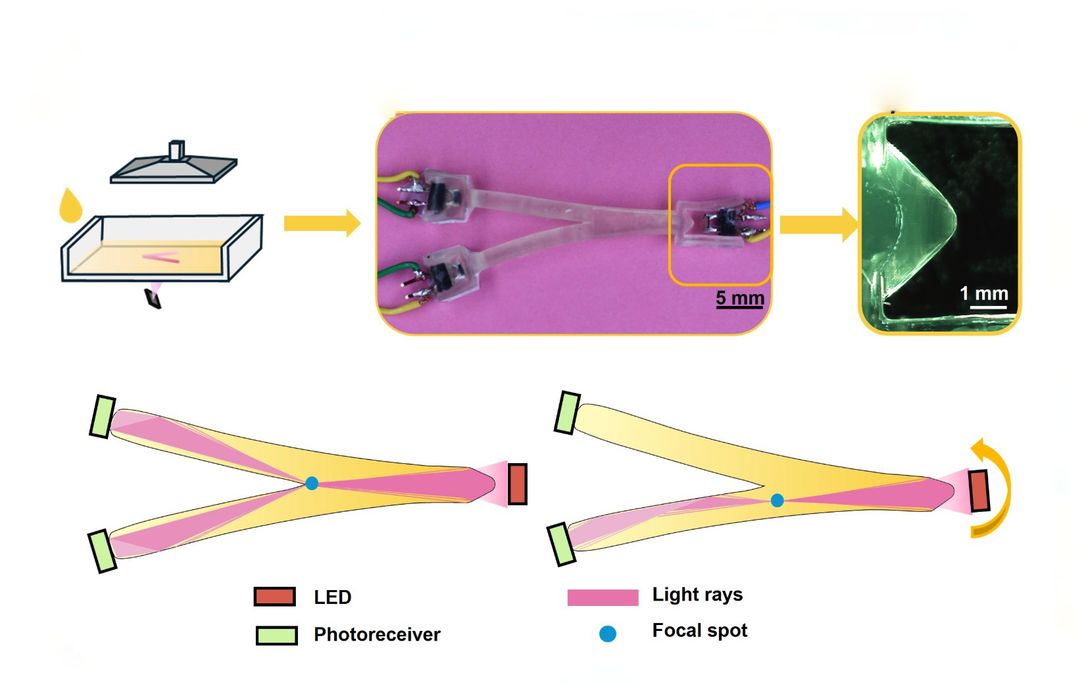
The core idea is straightforward: a small printed lens focuses light from a tiny emitter into a soft waveguide path, and a receiver measures what emerges. When the body deforms under force or strain, the optical path changes. Bending alters curvature and leakage, compression changes contact and scattering, and shear can misalign the path. These changes appear as measurable shifts in intensity or timing at the photodiode.
A lens inside the structure does more than squeeze light into a narrow beam. It can reduce sensitivity to emitter misplacement, increase coupling efficiency, and enable compact turns by expanding and refocusing the beam where needed. In principle, a lens also helps decouple modes — allowing a sensor to distinguish between normal pressure and bending if the geometry steers light through regions that respond differently to each load case. This is the kind of nuance soft roboticists want for fingertips, skins, and grippers.
What Is New And What It Means For AM
Optical elastomer sensors are not new, but most solutions embed glass fiber, add external microlenses, or require manual polishing of waveguide ends. A fully 3D printed lens and guide would require less human touch time and tighter part-to-part consistency. That matters for array setups, where a dozen or a hundred identical pixels must be calibrated quickly. If SOLen’s print is truly monolithic, service bureaus could print custom shapes on demand without an assembly step.
However, printed elastomers typically scatter light due to microvoids and refractive index fluctuations, especially with fast DLP exposures or low post-cure. Many clear resins yellow with UV and heat, changing transmission over time. Surface roughness on internal optics elevates loss, which reduces dynamic range at the detector. The paper does not state the printer class, resin, or build volume, and it does not list sensitivity, response time, or lifetime, so we cannot yet assess throughput, resolution, or durability. Those numbers will determine whether this is a lab curiosity or a practical platform.
Compared to resistive inks or liquid metal channels, an optical path is immune to electromagnetic interference and can exhibit lower hysteresis, but it demands careful packaging of LEDs and photodiodes and stable coupling across temperature swings. From an AM perspective, the interesting part is geometry freedom: with CAD and slicers, teams can sculpt beam paths, add mechanical compliance where needed, and integrate strain relief and mounts for off the shelf optoelectronics. That design space aligns with the strengths of vat photopolymerization and multimaterial inkjet, where features on the order of tens of microns are realistic.
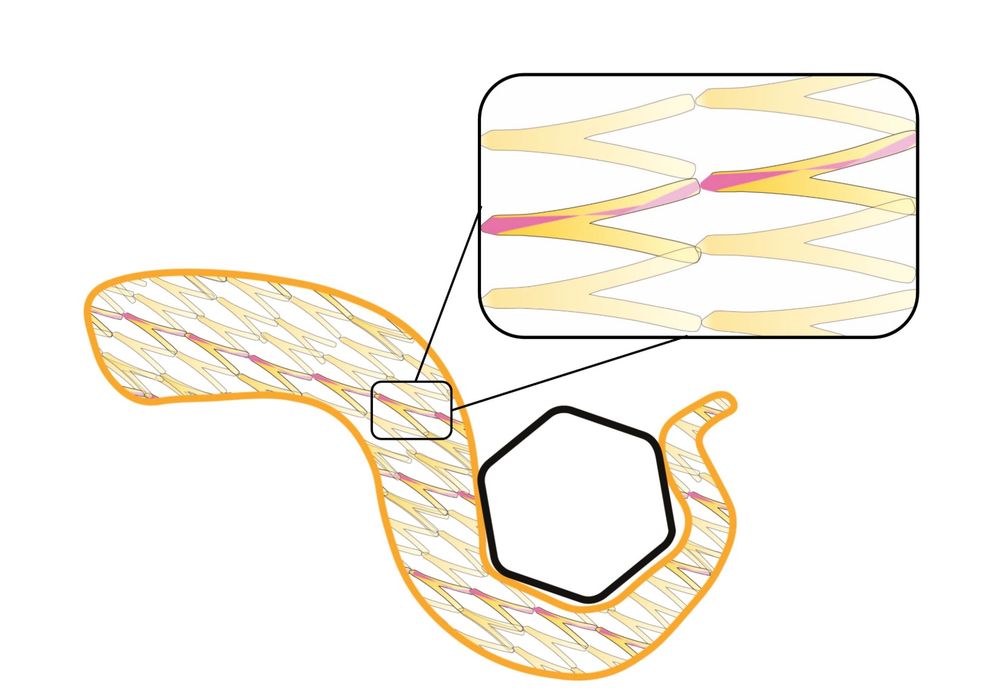
Potential applications range from tactile pads for grippers and cobot skins to wearable pressure mapping and soft catheter navigation. Arrays could be tiled within a single build to cover curved surfaces with uniform pixel pitch. If the lens improves signal to noise enough, fewer emitters might serve more pixels via time or wavelength multiplexing, cutting cost and wiring.
I’d like to see more quantitative data: force or strain sensitivity, linearity, cross axis rejection, thermal drift, and repeatability over many thousands of cycles. It will also be important to see how easily other labs reproduce prints on different machines, and whether the lens requires special post-processing to reach useful clarity. If the researchers release CAD or process parameters, adoption could move quickly across soft robotics groups that already run DLP or SLA printers.
If SOLen proves robust, it could become a printable building block for soft systems, giving designers a way to route light like nerves route signals.
Via OpenAlex