

![The 3D printed microbot is far smaller than a coin [Source: Georgia Tech]](https://fabbaloo.com/wp-content/uploads/2020/05/image-asset_img_5eb09390d11d2.jpg)
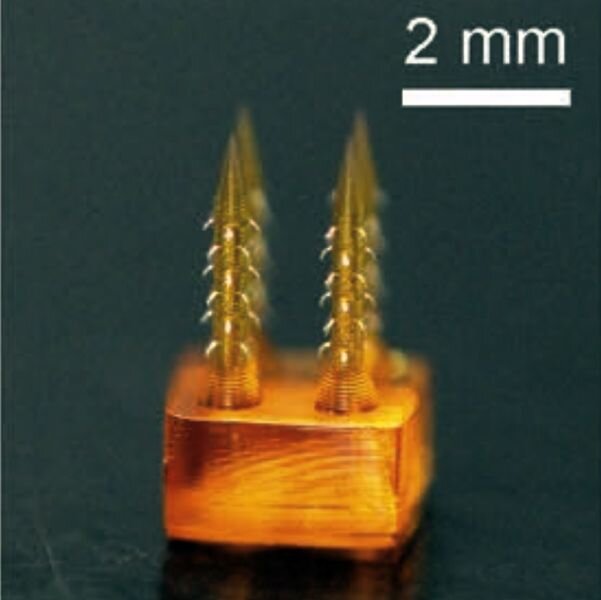
Researchers at Georgia Tech have produced a 3D printed microbot that is powered by vibration.
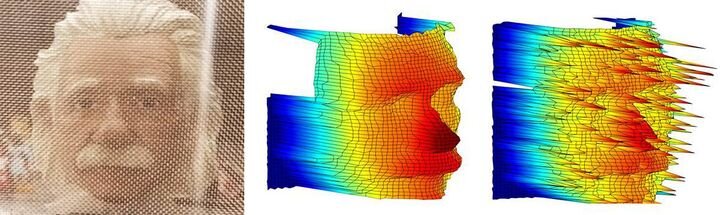
The polymer structure is quite small, only two millimeters in length. But it involves a complex geometry that includes a small collection of bristly “legs”. These are carefully designed to react to external vibrations and wiggle in such a way as to propel the structure forward.
By using different leg variations and combining them with different vibration frequencies, the researchers were able to develop ways to provide arbitrary motion.
Microscopic Electricity Generation
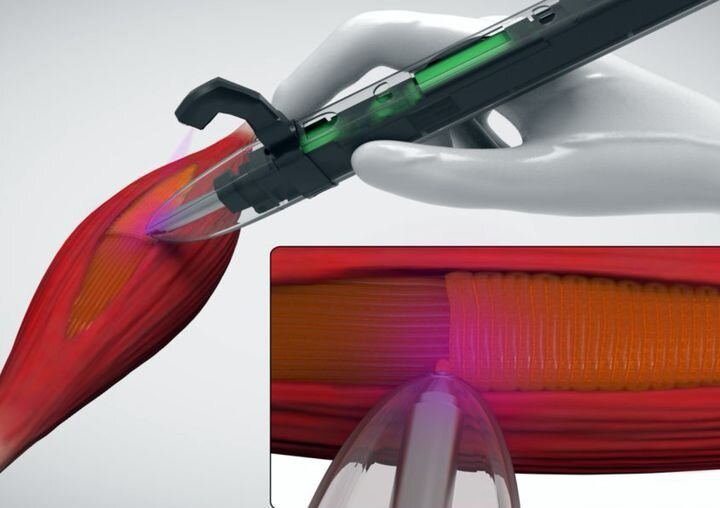
The unusual device was created by attaching a piezoelectric actuator to a 3D printed polymer structure. The piezoelectric actuator would be used to generate electricity onboard the “vehicle” by transforming external vibrations into electricity. Georgia Tech explains:
“The piezoelectric actuators, which use the material lead zirconate titanate (PZT), vibrate when electric voltage is applied to them. In reverse, they can also be used to generate a voltage, when they are vibrated, a capability the micro-bristle-bots could use to power up onboard sensors when they are actuated by external vibrations.”
Two-Photon Polymerization
![The 3D printed microbot was produced with two-photon polymerization [Source: Georgia Tech]](https://fabbaloo.com/wp-content/uploads/2020/05/image-asset_img_5eb09391245ea.jpg)
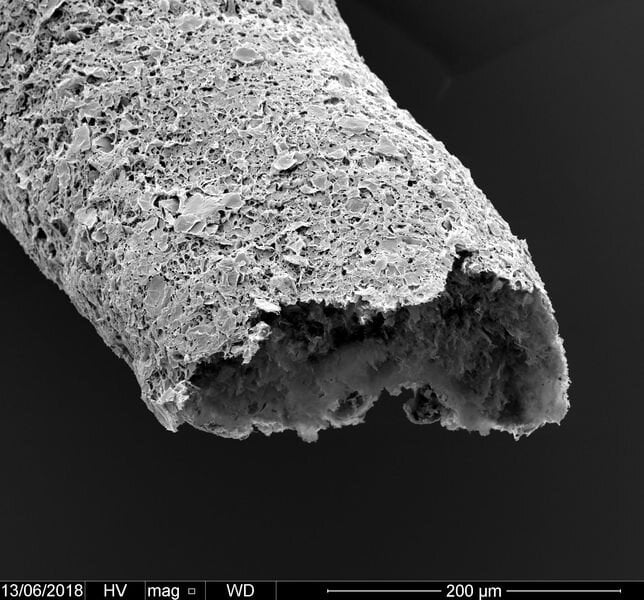
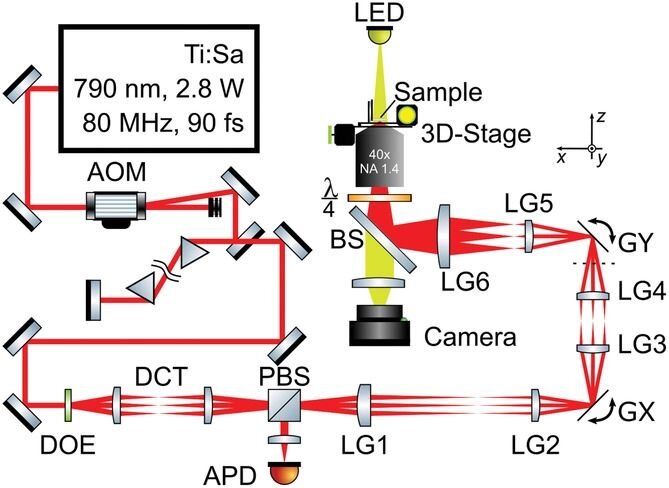
How was the very tiny polymer structure created? The researchers used a relatively rare technique called “two-photon polymerization”. This approach, invented some time ago at Vienna University of Technology, overcomes a significant limitation of conventional laser lithography: depth.
In conventional SLA systems, the laser immediately polymerizes the resin upon exposure. But in two-photon polymerization lithography (TPP), the laser is adjusted by lenses to come to a focus at variable depths within the resin. The “two-photon” concept is that it takes more than a single photon to cause polymerization, and thus the unfocused laser can travel through the resin without prematurely solidifying other portions.
By moving the laser focal point in 3D motion through the resin chamber, a TPP system can “trace” a 3D object that requires no support structures and have no layer delays as one sees in SLA systems.
However, don’t think TPP systems will arrive on your desktop anytime soon, as they require very specialized lasers that flash in the femtosecond range.
Vibration-Powered Microbot Specifications
![The 3D printed microbots swimming in solution [Source: Georgia Tech]](https://fabbaloo.com/wp-content/uploads/2020/05/image-asset_img_5eb09391b3cdd.jpg)
Georgia Tech explains the nature of the “microbes”:
“The micro-bristle-bots are approximately two millimeters in length, 1.8 millimeters wide and 0.8 millimeters thick, and weigh about five milligrams. The 3D printer can produce smaller robots, but with a reduced mass, the adhesion forces between the tiny devices and a surface can get very large. Sometimes, the micro-bots cannot be separated from the tweezers used to pick them up.”
For now, it seems the researchers are developing more sophisticated ways these microbots can swim through liquids, eventually leading to methods of commercializing this amazing technology.
Via Georgia Tech

A research thesis details the incredibly complex world of volumetric 3D printing. We review the highlights.