
A new preprint outlines miniature robots propelled by piezoelectric-actuated, 3D printed resonators that promise autonomous locomotion with trajectory control embedded in the structure itself.
Microrobotics has long wrestled with how to turn small vibrations into useful, controllable motion without bulky gear trains or complex electronics. Researchers often rely on external fields, tethers, or carefully phased multi-actuator setups to steer millimeter-scale platforms. By contrast, this work argues that the motion plan can be baked into the mechanics of the robot via resonant 3D printed geometries, then excited by a simple piezoelectric driver.
The concept fits neatly with additive manufacturing’s strengths. Photopolymer processes like Stereolithography (SLA) or micro-DLP make it practical to print thin flexures and tuned beams that are difficult to machine at this scale. A single monolithic print can integrate compliant legs, vibration isolators, and mode-selective resonant features that convert high-frequency actuation into net translation and turning.
While the preprint does not read like a product launch, its framing — autonomous locomotion and embedded trajectory control — signals a push toward lower system complexity. If geometry handles guidance, the electronics stack can shrink to a drive signal, a battery or tether, and perhaps a simple frequency command.
How The Printed Resonator Does The Driving
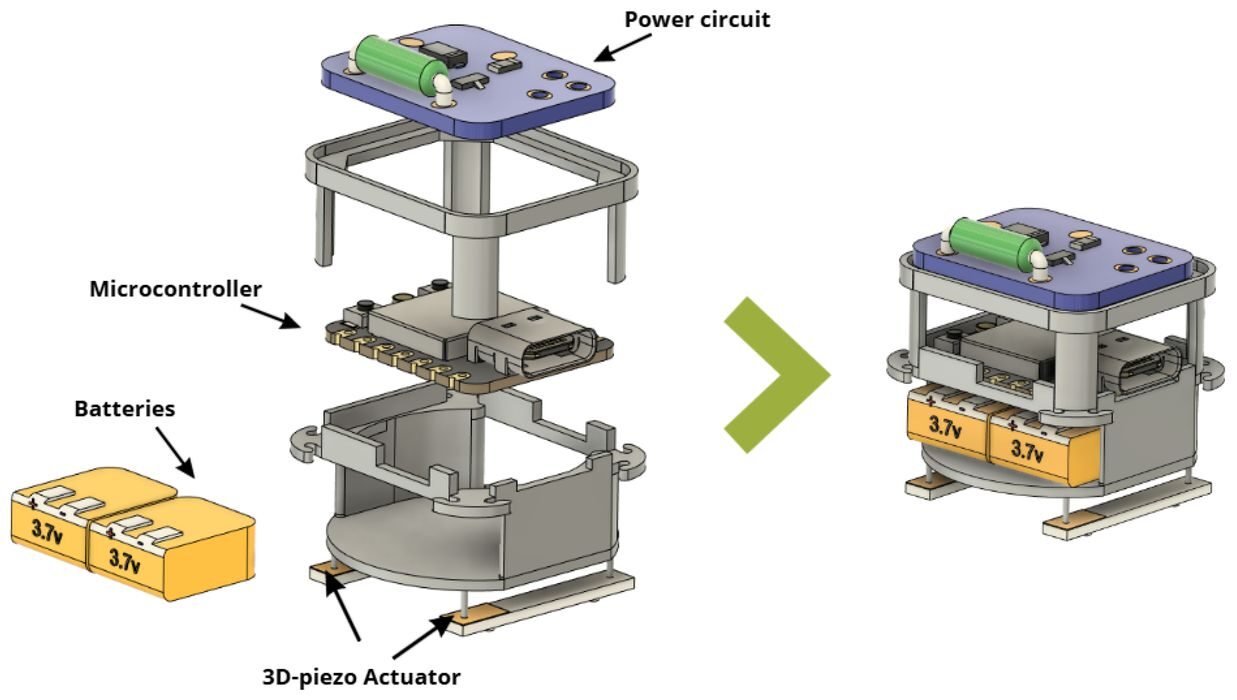
At the core is a piezoelectric patch or buzzer bonded to a 3D printed resonator. When driven at specific frequencies, the resonator enters distinct vibrational modes. Each mode generates a different frictional gait across the contact feet, producing forward motion, turning, or diagonal movement depending on how the deformation pattern sweeps the substrate.
This is not entirely new — prior lab demos have used phase-shifted piezos, shunted circuits, or microbristle anisotropy to steer. What is new here is the explicit use of the printed structure to localize and select trajectories, so steering becomes a matter of choosing frequencies rather than dynamically coordinating multiple actuators. In practice, a single piezo element plus a frequency sweep can select between several predesigned motion vectors.
The potential advantages are tangible for AM-savvy readers. Geometry-driven control reduces wiring and assembly touch time, enables parallel printing of many robots, and makes design iteration as simple as reprinting a different resonant layout. It also scales — a service bureau could tune resonant families for different payloads or substrates by adjusting beam thickness and foot patterns within the same STL envelope.
Limits, Materials, And Who Cares
There are constraints, and the preprint leaves several important numbers unstated. Throughput in microrobotics translates to speed, payload, and efficiency; those figures are not specified. Photopolymer damping can lower the quality factor of resonators, cutting efficiency and narrowing usable mode windows. Fatigue of thin, printed flexures under high-frequency strain is another risk, especially for long duty cycles.
Materials are likely limited to stiff photopolymers with low internal loss; soft elastomers would dissipate too much energy. Tolerances matter, too: small errors in beam thickness shift resonant peaks, so repeatability across printers and batches must be proven. Power is an open question — “autonomous” could refer to control autonomy rather than fully untethered operation. If a battery is onboard, electromagnetic noise, mass, and mounting will change mode shapes and must be accounted for.
Even with those caveats, the approach targets real users. Labs building swarms or education kits could benefit from cheap, quickly printed locomotion platforms. Inspection teams might someday deploy these on smooth surfaces inside enclosures where wheeled bots struggle. And for mechanism designers, this is a compelling case study in encoding function in form using AM.
What To Watch Next
Validation will hinge on frequency-response plots, speed-per-watt comparisons, durability data, and how well the printed modes survive adhesive bonding of piezo patches. Demonstrations on varied substrates — glass, PCB solder mask, matte polymer sheets — would clarify real-world traction limits. If frequency hopping enables repeatable turns within tight tolerances, the embedded-control claim will look strong.
On the adoption path, expect early availability as open designs or reference STLs rather than commercial kits. If the team can show consistent behavior across multiple desktop SLA machines and resins, that would be a significant milestone toward broader uptake.
Microrobots that “print in their steering wheel” make an elegant argument: when geometry does the thinking, the electronics can finally relax.
Via Preprints