

Researchers have developed a way to 3D print robotic musculoskeletal structures in a single material.
Everybody has a musculoskeletal system: it’s the meat and bones in your limbs that keep you moving. The muscles provide the power, and the bones provide the structure.
For years, researchers have been building robotic systems that mimic this type of motion system. Typically, there are the equivalents of bones (like an aluminum spar) and the equivalent of muscles (like a hydraulic piston, for example). With appropriate design and control, these can provide motion in a robotic system.
Now, researchers have developed a new approach where 3D printing technology is at the focus. They’ve developed a system to generate highly complex lattice structures that can provide both bone and muscular functions.
They explain:
“By introducing previously unknown approaches to the geometric design of unit cells within lattice structures—based on continuous blending and superposition of existing lattice geometries—we can precisely tune stiffness and anisotropy. These designs enable the creation of three-dimensional structures with spatially varying mechanical properties, ranging from tissue-like compliance to rigid, bone-like load-bearing capabilities.”
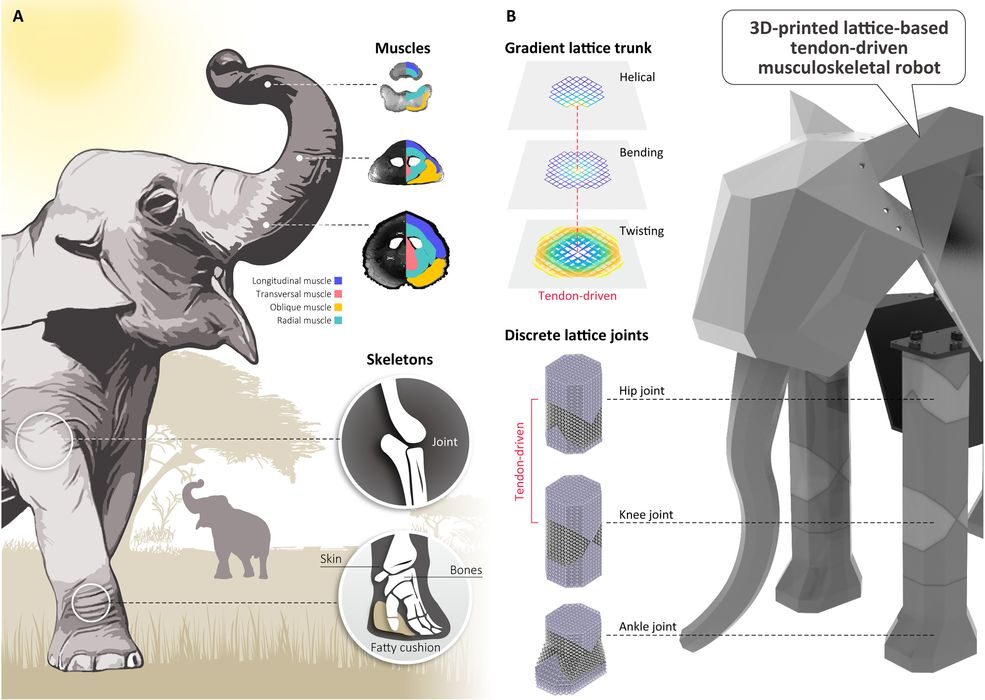
To test their system, the researchers literally 3D printed a robotic elephant. The elephant’s limbs and joints were made using the new technique. They were even able to produce a “continuously soft trunk”, which is quite an achievement.
This is really a study in metamaterials. Metamaterials are objects that provide different mechanical functions than the base material they’re made from. For example, a mostly rigid thermoplastic, if printed in a suitable lattice, might form a squishy block. If a solid block were printed at the same volume, it would be entirely rigid. Same material, different properties based on the geometry.
What the researchers have done here is to generate changes in the metamaterials throughout the structure in a way that provides the necessary functions. The “bone” regions would be more rigid, while the joints would be flexible.
Their approach was to use two different algorithms for geometry generation. One is called “Topology Regulation”, where each element in the lattice is generated on a range between isotropic and anisotropic behaviour. The other is “Superposition Programming”, where they vary the orientation of each lattice unit cell.
These simple approaches can be combined for tens of millions of possible configurations. They say they can tune the mechanical properties through a considerable range: 25-300 kPa in stiffness, and 1.4-40 kPa in shear modulus.
For power, the researchers generated the equivalent of tendons, which attach to various portions of the overall structure, much like they would do in a living organism. They would travel through Bowden tubes within the structure. The tendons were powered by external servo motors, which would pull on them as required.
Their approach involved a complete digital design workflow, which included MATLAB, OpenSCAD, and STL generation.
The implications are interesting. This approach would allow anyone with a resin 3D printer to design and 3D print a robotic system in a single part. It would only require installation of some motors to activate the system, and of course, a pile of software to make it do something useful.
One can imagine such designs being posted on, say, Printables, where they could be downloaded as a kind of “instant robot”.
Via ScienceAdvances