
A new Turkish patent describes a mobile, multi-robot Fused Filament Fabrication (FFF) system that prints on a shared platform to sidestep conventional build-volume limits.
Most 3D printers fix the gantry around a defined envelope, which means the machine must be larger than the part. That makes large-format prototyping expensive and unwieldy, while print farms boost throughput but not single-part size. Researchers and vendors have long explored multi-gantry toolchangers, robot-arm cells, and even swarm concepts, yet synchronizing extrusion on one part has remained a hard problem.
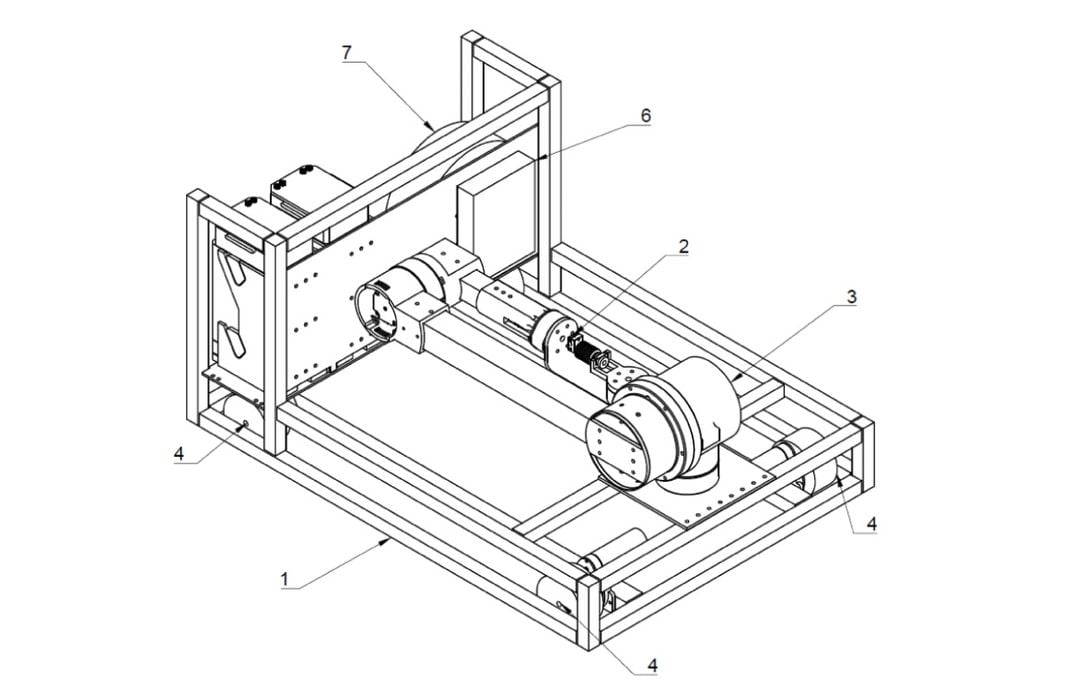
How The Mobile Printer Swarm Works
A new patent proposes a central control computer coordinating at least two mobile printer robots that roam a flat printing platform via an integrated motion system. Each robot carries a robot arm with an extruder at the end effector. A robot control computer on each unit moves the arm per commands from the central controller, while the extruder melts and deposits the printing material along a specified toolpath. The robots report their status and position back to the central controller for continuous replanning.
The patent positions this architecture for large-scale prototyping and potentially even mass production. Rather than the printer’s frame setting the limit, the platform size becomes the constraint, so builds could, in principle, expand to architectural scales. It may even be suitable for use in large-scale 3DCP operations, if modified for concrete extrusion.
The paper also highlights multi-material capability by assigning different materials to different robots. Absent are the usual specifications — materials, nozzle sizes, layer heights, tolerance, or surface finish — suggesting this could be an early-stage concept rather than a market-ready device, rushed to a patent application.
Opportunities And The Hard Problems
There are clear upsides to a mobile swarm architecture. Parallel deposition could cut cycle time for bulky parts, while a fleet of small, modular robots may lower capital cost, ease maintenance, and provide redundancy. Service bureaus that produce exhibition pieces, patterns, or large polymer tooling could benefit if the system delivers predictable throughput without an extra-large, custom gantry. For design studios, assigning distinct filaments to specific robots hints at functional multi-material structures in a single build.
But the hard parts are not so trivial. Registration and calibration across multiple moving frames must be very precise, or seams will show and tolerances will drift. Collision avoidance, arm reach limits, and task partitioning all require sophisticated scheduling similar to multi-laser optimization in Laser Powder Bed Fusion, only with extruders that must respect cooling times and interlayer adhesion. Thermal management over a large surface is a challenge; if one robot arrives too late to a seam, bonding may weaken. The patent does not specify localization methods, sensors, or other strategies, leaving open how the robots maintain accurate Z and XY references as a print job proceeds.
Feeding and power logistics are also important. Will robots carry onboard filament and batteries, or run tethered with umbilicals that complicate navigation? How are supports generated and removed on a platform where multiple arms need access? Platform flatness, warp control, enclosure heating, and airflow will all influence reliability on meter-scale builds. Without stated numbers for throughput, accuracy, or part success rate, it is impossible to benchmark this approach against large-format gantry FFF or conveyor-based continuous printing systems.
Proof will come from a prototype, not claims. A convincing demo would show two or more robots dynamically splitting a toolpath, stitching bead interfaces cleanly, and finishing a sizeable part without human intervention. Reliability data, refill and recharge strategies, and recovery behaviors after a fault will determine whether this is practical in a production cell. If those hurdles are cleared, a swarm platform could evolve into a flexible, factory-floor alternative to the traditional build chamber.
For now, this is an intriguing concept, and one that many may have been thinking about. I’m excited to see this implemented beyond just a patent.
Via Google Patents