
A new research paper describes an automatic calibration method that lets multiple robotic 3D printers work together on the same build with less setup and better alignment.
Cooperative 3D printing (C3DP) promises to boost throughput and expand build volumes by assigning different portions of a part to different machines that print at the same time. The idea has circulated for years in lab demos, but consistent results depend on something elusive, but quite straightforward: getting every robot’s tool center point into the same coordinate system, at the correct height, with the right extrusion offsets, before any extrusions take place.
The new study, published in the MDPI journal Machines, focuses on this challenge. Instead of lengthy manual probing, fixture building, or external motion-capture rigs, the authors describe a procedure that automatically estimates each printer’s position relative to a shared reference and refines it until stitch errors between neighboring toolpaths drop below a tolerance. For readers familiar with toolchanging FFF 3D printers, think of it as X/Y nozzle offset and Z offset between multiple 3D printers.
Manual multi-robot alignment can consume hours and still drift mid-job due to thermal growth, platform deflection, or small kinematic errors. An automated loop that registers participating robots at the start and re-checks during a build could turn swarm printing from a today’s experimental demos into something that might be commercially viable.
Why Calibration Blocks Swarm Printing
In single-gantry fused filament fabrication (FFF), toolhead miscalibration mostly shows up as layer squish, elephant’s foot, or dual-nozzle seams. In C3DP, miscalibration becomes a showstopper. If one robot deposits a perimeter and another attempts the infill, even a small X/Y mismatch causes gaps, ridges, or weak bonds at the seam. A tiny error in Z offset can be worse, either plowing a previous extrusion or air printing with negligible contact.
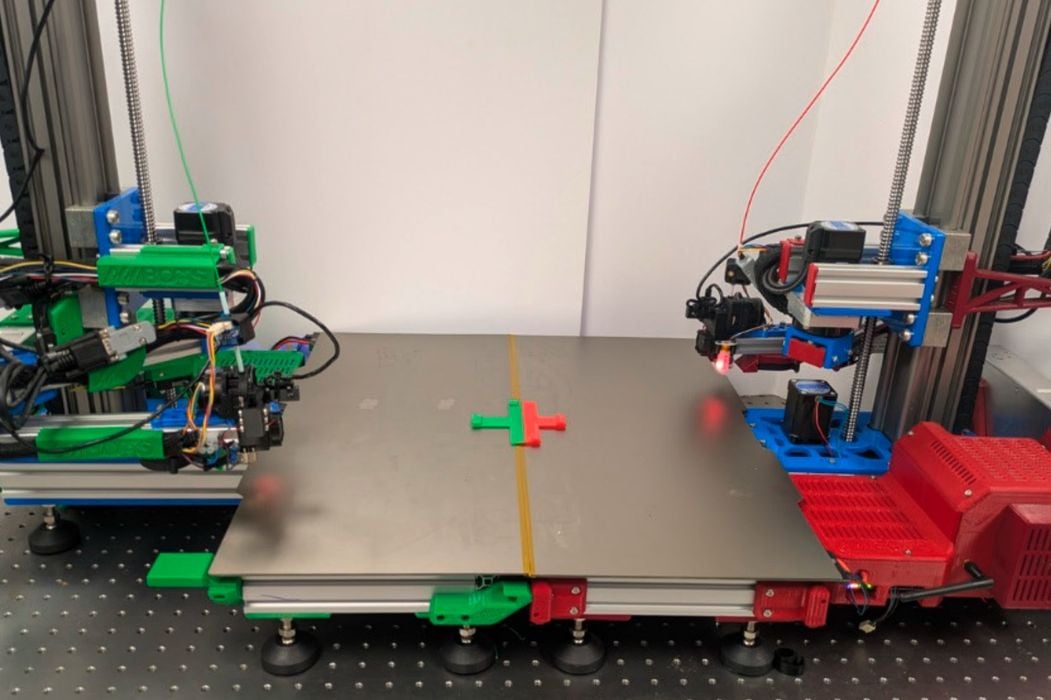
Previously this problem was often solved with rigid shared frames, external precision metrology, or tightly synchronized multi-gantry systems, which do work, but are complicated and expensive in terms of labor and equipment. The paper’s focus on automatic calibration suggests the system leverages onboard sensing to determine each robot’s movement and then iteratively minimize errors. The researchers performed cooperative printing demonstrations, which confirms the method is good enough to handle real toolpaths rather than made up scenarios.
The innovation here is a calibration workflow that reduces human effort and aligns dissimilar machines to a common frame of reference. If this procedure can run quickly at the job start and periodically during long builds, it would enable an easier approach to use multiple 3D printers building a single object.
If this new iterative approach is validated, it could lead to big changes in large scale 3D printing. Instead of buying one huge printer, a squad of smaller robots could share work, reconfigure quickly, and possibly even offer more reliability: if one robot fails, others continue.
In the future, the next large format 3D printer might actually be a collection of small 3D printers.
Via Machines (MDPI)